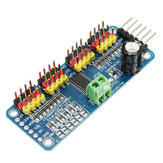
Πίνακας ελέγχου οδηγού κινητήρα Servo PWM 16 καναλιών με κατάλληλο PCB TTL bluetooth για ρομπότ
US$11.12
Ένα μέρος της κριτικής έχει μεταφραστεί αυτόματα.

thanks for your professional services and clean product






Ωραίος κρατικός ελεγκτής μηχανών. Είχε ένα πολύ παλιό λάπτοπ για να τρέξει την εφαρμογή κινήσεων πνεύματος, οπότε η εγκατάσταση ήταν προβληματική καθώς η θύρα USB ήταν μη αναγνωρίσιμη. Το ξεπέρασα χρησιμοποιώντας το USB για το εργαλείο θύρας. Αυτή τη στιγμή απλά τρέχω ένα σερβό σε μια ταμπέλα για να δω τι μπορεί να κάνει η εφαρμογή. Οραματίζονται διάφορα προγράμματα ρομποτικής αυτοματοποίησης στην πορεία. Μεγάλη αξία για τον σκοπό που προορίζεται.

Sicher verpackt angekommen.

Good quality easy to use 16 channel servo controller , compact size with separate servo supply upload servo sequences using the pc software excellent value for money

Permet de bien regler les servos
Το άρθρωμα είναι πολύ χρήσιμο για τον έλεγχο των σερβών. Απαιτεί χωριστή ισχύ για τους σερβοσυσσωρευτές (συνδεδεμένος με πράσινο σύνδεσμο). Μπορεί να ελεγχθεί μέσω UART ή μέσω συσκευής USB HID. μπορεί να προγραμματιστεί για χρήση χωρίς υπολογιστή (σπριπτογράφηση σερβομάρτυρα). Δυστυχώς δεν υπάρχει διαθέσιμος πηγαίος κώδικας εφαρμογής pc ούτε api. Ευτυχώς κάποιος έκανε αντίστροφη μηχανική του πρωτοκόλλου HID που χρησιμοποιείται από συσκευή https://medium.com/meseta-robots/witmotion-servo-control-reverse-engineering-d5acf7ce528f
everything ok
HI, gonna use this for RC construcin vehicles. Write my own code for Arduino. With help of the pdf I extracted the data for my own code. I only need position control per 1 servo. ( no groups etc needed ) When powering ON the servo board, all chanels are in middle-position, 1,5ms pulswidth by 20Hz! With the pdf you can create, example: uart2_write( 0xff ); uart2_write( 0x02 ); uart2_write( 0x03 ); uart2_write( 0xdc ); // low byte uart2_write( 0x05 ); // high byte
Bon matériel en recommander
Ως συνήθως, ποιοτικό προϊόν για χρήση σε πολλά έργα