Ακριβείς λεπτομέρειες:
Προδιαγραφές:
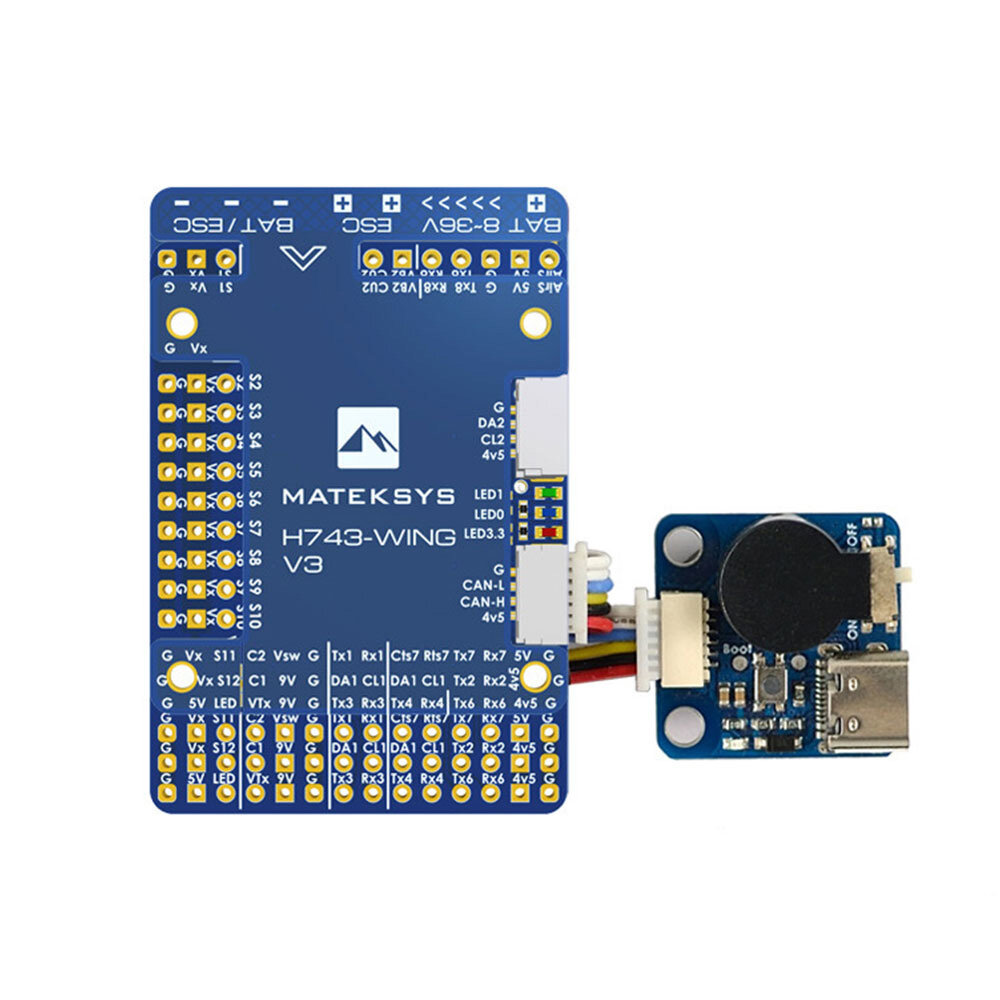
Όνομα Μάρκας: Ματέκ
Όνομα αντικειμένου: H743-WING V3
Οδηγός γρήγορης εκκίνησης, Κάντε κλικ εδώ
Προδιαγραφές FC:
MCU: STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash
IMU: MPU6000 (SPI1) και ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: υποδοχή κάρτας MicroSD (SDIO)
7x θύρες UART (1,2,3,4,6,7,8) με ενσωματωμένη αντιστροφή.n13x έξοδοι PWM (συμπεριλαμβανομένου του "pad LED")n2x I2Cn1x CANn6x ADC (VBAT,Ρεύμα,RSSI,Αναλογική Ταχύτητα Αέρα,VB2,CU2)n3x LED για την κατάσταση FC (Μπλε,Κόκκινο) και ένδειξη 3,3V (Κόκκινο)n1x διακοπτικό SPI3
Επεκτείνετε το USB/Beep με τον τύπο-C (USB2.0)
Αλλαγή εισόδων διπλής κάμερας
Διακόπτης τροφοδοσίας κάμερας/VTX 5V/9V(12V)
Ακριβής ανιχνευτής ρεύματος (συνεχές 90A, αιχμή 220A)
Αισθητήρας τάσης μπαταρίας: 1K:10K (Κλίμακα 1100 στο INAV, BATT_VOLT_MULT 11.0 στο ArduPilot)
Διαιρέτης τάσης VB2 ADC: 1K:20K
Διαιρέτης τάσης AirSpeed ADC: 20K:20K
Στατική ισχύς 160mA@5V
Λογισμικό FC
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Λογισμικό υλικού Κάντε κλικ εδώ
PDB
Εύρος τάσης εισόδου: 8~36V (3~8S LiPo) με προστασία TVS
2x ESC προστακτικές τροφοδοσίας
Ηλεκτρονικός αισθητήρας: 220A, 3.3V ADC (Κλίμακα 150 στο INAV, 66.7 A/V στο ArduPilot)
Αντίσταση αισθητήρα: 90A συνεχόμενα, 220A αιχμή.
Έξοδος 5V BEC
Σχεδιασμένο για χειριστή πτήσης, δέκτη, OSD, κάμερα, βομβητή, λωρίδα LED 2812, μονάδα GPS, AirSpeed
Έξοδος 5,15 +/- 0,1V DC
Συνεχής ρεύμα 2 αμπέρ, 3A Μέγιστο
Έξοδος BEC 9V / 12V
Σχεδιασμένο για πομπό βίντεο, κάμερα, γυμβάλι κ.λπ.
Συνεχές ρεύμα 2 Αμπέρ, αιχμή 3Α
Επιλογή 12V με πλακέτα ενός ελατηρίου
Έξοδος BEC Vx
Σχεδιασμένο για Servos
Ρυθμιζόμενη τάση, προεπιλογή 5V, 6V ή 7.2V μέσω ζουμπερ
Συνεχής τρέχουσα 8 Αμπέρ, 10A Έκσταση
Έξοδος BEC 3.3V
Γραμμικός ρυθμιστής
Συνεχής ρεύμα: 200mA
Φυσική
Τοποθέτηση: 30,5 x 30,5mm,Φ4mm με Grommets Φ3mm
Διαστάσεις: 54 x 36 x 13 mm
Βάρος: 30g με επέκταση USB
Πακέτο περιλαμβάνει
1x H743-ΦΤΕΡΟ
1x USB(Type-C)/Επέκταση (Παθητικός μπάζερ)
1x καλώδιο JST-SH-6P προς JST-SH-6P μήκους 20cm για επέκταση USB.
Καλώδιο 2x 20cm JST-GH-4P προς JST-GH-4P για τις θύρες CAN & I2C
1x πυκνωτής Rubycon ZLH 35V 470uF
Δακτυλίων Dupont 2.54 (Το σανίδι αποστέλλεται ανάποδο)
Χαρτογράφηση INAV

ΕΙΣΑΓΩΓΗ ΡC
Το pin Rx6, το οποίο αντιστοιχεί αρχικά σε ένα είσοδο χρονομέτρου, μπορεί να χρησιμοποιηθεί για όλα τα πρωτόκολλα δέκτη που υποστηρίζονται από το ArduPilot, εκτός από το CRSF που απαιτεί μια πραγματική σύνδεση UART. Ωστόσο, τα διπλής κατεύθυνσης πρωτόκολλα που περιλαμβάνουν τηλεμετρία, όπως το SRXL2 και το FPήt, όταν συνδέονται με αυτόν τον τρόπο, θα παρέχουν μόνο RC χωρίς τηλεμετρία.
Για να επιτραπεί η διαθεσιμότητα CRSF και της ενσωματωμένης τηλεμετρίας στους δέκτες Fpήt, CRSF, και SRXL2, μπορεί επίσης να γίνει η ρύθμιση του ακροδέκτη Rx6 για χρήση ως πραγματικά ακροδέκτης UART RX για χρήση με δίκαναλα συστήματα με την ρύθμιση BRD_ALT_CONFIG σε "1" έτσι ώστε να γίνει η είσοδος RX της θύρας SERIAL7.
Με αυτή την επιλογή, SERIAL7_PROTOCOL πρέπει να οριστεί σε "23", και:
* Το PPM δεν υποστηρίζεται.
To SBUS/DSM/SRXL συνδέεται στο pin Rx6, αλλά το SBUS απαιτεί ότι ΕΠΙΛΟΓΕΣ_SERIAL7 να οριστεί σε "3".
* Η FPήt απαιτεί σύνδεση με το Tx6 και ΕΠΙΛΟΓΕΣ_SERIAL7 ορίστε σε "7". Εάν η τηλεμετρία δεν λειτουργεί, δοκιμάστε να ΕΠΙΛΟΓΕΣ_SERIAL7 = 135.
Το CRSF απαιτεί επίσης σύνδεση Tx6, εκτός από Rx6, και παρέχει αυτόματα τηλεμετρία. Ορίστε ΕΠΙΛΟΓΕΣ_SERIAL7 σε "0".
* Το SRXL2 απαιτεί σύνδεση με το Tx6 και παρέχει αυτόματα τηλεμετρία. Ορίστε ΕΠΙΛΟΓΕΣ_SERIAL7 σε "4".
Οποιοσδήποτε UART μπορεί να χρησιμοποιηθεί για συνδέσεις συστημάτων RC στο ArduPilot και είναι συμβατός με όλα τα πρωτόκολλα εκτός από το PPM. Δείτε Συστήματα ελέγχου ραδιοφώνου για λεπτομέρειες.
ArduPilot Ρελέ(PINIO)
Η κάμερα-1 και το Vsw είναι ενεργοποιημένα από προεπιλογή
Βεβαιωθείτε ότι 2 κάμερες έχουν ρυθμιστεί με ίδιο μορφότυπο βίντεο, είτε PAL είτε NTSC.
GPIOs
PD10 PINIO1 ΕΞΟΔΟΣ GPIO(81) //Διακόπτης τροφοδοσίας Vsw pad
- PD11 PINIO2 ΕΞΟΔΟΣ GPIO(82) //Διακόπτης κάμερας
# ΕΠΙΛΟΓΗ_RCx: Επιλογή εισόδου RC
- 28 Ρελέ Ανοικτό/Κλειστό
- 34 Σειρήνα2 Ενεργοποίηση/Απενεργοποίηση
- 35 Αναμονή3 Ενεργό/Ανενεργό
- 36 Ρελέ4 Ενεργ./Απεν.
παρ. π.χ.
- RELAY_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //Ενεργοποίηση/Απενεργοποίηση ρελέ, Χρησιμοποιήστε το CH7 του πομπού για να αλλάξετε το Vsw
- RELAY_PIN2 82 //Διακόπτης κάμερας GPIO
- RC8_OPTION 34 //Ενεργοποίηση/Απενεργοποίηση Relay2, Χρησιμοποιήστε το CH8 του πομποδέκτη για να εναλλάσσετε την κάμερα
ή
- ΠΟΜΠΟΔΕΚΤΗΣ_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Ενεργοποίηση/Απενεργοποίηση του Relay3, Χρησιμοποιήστε το CH9 του Πομπού για να αλλάξετε το Vsw
- RELAY_PIN4 82 //Εναλλαγή GPIO κάμερας
RC10_ΕΠΙΛΟΓΗ 36 //Ενερ/Απεν Τελ, Χρησιμ CH10 του Πομπού για να μεταβείτε στην κάμερα
Η παραμετροποιημένη λειτουργία θα ενεργοποιηθεί όταν η τιμή της παλμοτσεπίδας του βοηθητικού διακόπτη γίνει μεγαλύτερη από 1800. Θα απενεργοποιηθεί όταν η τιμή πέσει κάτω από 1200.
Ελέγξτε την τιμή pwm που αποστέλλεται από τον πομπό όταν το διακόπτης είναι υψηλός και χαμηλός χρησιμοποιώντας την οθόνη Βαθμονόμησης Ραδιοφώνου από το Αρχική Διάταξη >> Υποχρεωτικός Εξοπλισμός >> Mission Planner. Εάν δεν ανεβαίνει πάνω από 1800 ή κατεβαίνει κάτω από 1200, είναι καλύτερο να ρυθμίσετε τα άκρα του σερβομηχανισμού στον πομπό.
Συμβουλές και Σημειώσεις
ArduPilot
*Η τρέχουσα έκταση του αισθητήρα είναι 220Α στο H743-WING-V2/V3, βεβαιωθείτε ότι ρυθμίζετε BATT_AMP_PERVLT σε 66,7
* με το ArduPilot 4.1 ή νεότερη έκδοση, ορίστε το INS_ENABLE_MASK σε 7 ή προεπιλογή 127.
* Παρακαλώ κατεβάστε αεροπλάνο 4.2.0 ή νεότεροΛογισμικό ArduPilot για H743-WING-V3
Συνιστάται η χρήση του STM32CubeProgrammer για τη διαγραφή του MCU και τη μεταφόρτωση του firmware. ελέγξτε αυτό το ιστολόγιο http://www.mateksys.com/?p=6905
INAV
*Η τρέχουσα έκταση του αισθητήρα είναι 220Α στο H743-WING-V2/V3, βεβαιωθείτε ότι ρυθμίζετε Κλίμακα ρεύματος έως 150
* Το H743-WING-V3 δεν υποστηρίζεται από το INAV4.1 που έχετε λάβει από τον ρυθμιστή. παρακαλούμε λήψτε inav_4.1.0_MATEKH743_42688 από την ιστοσελίδα.
Από το INAV5.0, θα μοιράζονται το ίδιο firmware.
Άλλοι
* Εάν οι ESC που χρησιμοποιείτε δεν έχουν ενσωματωμένους αρκετούς πυκνωτές, απαιτείται χρήση ηλεκτρολυτικού πυκνωτή χαμηλής ESR για τη μείωση του θορύβου ESC.