Ακριβείς λεπτομέρειες:
Προδιαγραφές FC
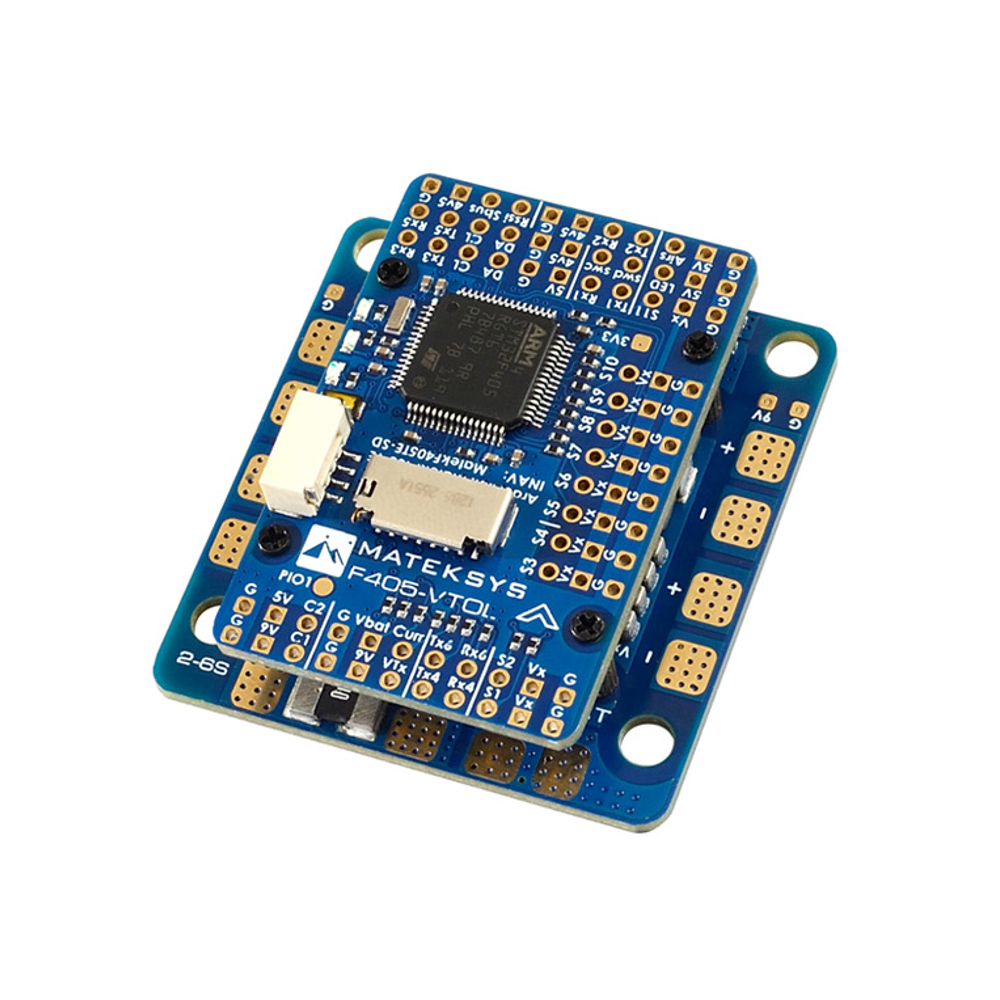
MCU: STM32F405RGT6, 168MHz , 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Μαύρο κουτί: Υποδοχή κάρτας MicroSD
6x UART, 1x επιλογή Softserial_Tx (INAV)
12 εξόδους PWM
1x I2C
4x ADC (VBAT, Τρέχον, RSSI, Ταχύτητα αέρα)
1x ανταλλακτικό ΠΙΝΙΟ
Επεκτείνετε το USB/Beep με τον τύπο-C (USB2.0)
Ενσωματωμένος αντιστροφέας σε UART2-RX για είσοδο SBUS
Εναλλάξιμη διπλή είσοδος κάμερας
Λογισμικό FC
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 ή νεότερη έκδοση)
Λογισμικό για τον ελεγκτή πτήσης Κάντε κλικ εδώ
PDB
Εύρος τάσης εισόδου: 6.8 ~ 30V (2 ~ 6S LiPo)
Αντίσταση αισθητήρα: 100A συνεχής, 220A κορύφης
5x ενεργοποιητές ESC ισχύος, σύνολο 100A συνεχούς ρεύματος
Υποστήριξη συνεχούς φορτίου έως και 100A στον προσαρμογέα ESC κοντά στην αντίσταση αισθητήρα ρεύματος
Υποστήριξη συνεχούς φορτίου έως 30Α και κορυφής 50Α σε κάθε pad ESC του Quadcopter
Διαίρεση τάσης μπαταρίας 1Κ:20Κ (Κλίμακα 2100 στο INAV, BATT_VOLT_MULT 21.0 στο ArduPilot)
Τρέχων αισθητήρας: 220A, ADC 3.3V (Κλίμακα 150 στο INAV, 66,7 A/V στο ArduPilot)
Έξοδος 5V BEC
Σχεδιασμένο για τον ελεγκτή πτήσης, τον δέκτη, το OSD, την κάμερα, το βομβητή, την ταινία LED_Strip 2812, το βομβητή, τον πομπό GPS, την ταχύτητα του αέρα
Συνεχής ρεύμα: 2 Αμπέρ
Έξοδος BEC 9V / 12V
Σχεδιασμένο για πομπό βίντεο, κάμερα, γυμβάλι κ.λπ.
Συνεχής ρεύμα: 2 Αμπέρ
Επιλογή 12V με πλακέτα ενός ελατηρίου
για σταθερή έξοδο 9V/12V, η είσοδος τάσης πρέπει να είναι μεγαλύτερη από την έξοδος τάσης +1V
Έξοδος BEC Vx
Σχεδιασμένο για Servos
Ρυθμιζόμενη τάση, προεπιλογή 5V, 6V ή 7.2V μέσω ζουμπερ
Συνεχές ρεύμα: 8 Αμπέρ, 10A Μέγιστο
για σταθερή έξοδο Vx, το εισερχόμενο τάσης πρέπει να είναι μεγαλύτερο από τάση Vx +1V
Έξοδος BEC 3.3V
Σχεδιασμένο για το Μοντέλο Baro / Compass και εξωτερικές συσκευές 3.3V
Γραμμικός ρυθμιστής
Συνεχής ρεύμα: 200mA
Φυσική
Τοποθέτηση: 25 x 25mm-Φ2mm,35 x 35mm- Φ4mm
Διαστάσεις: 45 x 42 x 15mm
Βάρος: 25g με προσαρμογέα USB/βουδζούρι
Συμπεριλαμβάνοντας
1x F405-VTOL
1x Επέκταση USB (Τύπος-C) / Μπιπ (Θαμβωτικός μετατροπέας) + Καλώδιο JST-SH-6P προς JST-SH-6P 20cm για τον επεκτεία USB.
Καλώδιο 1x 20cm JST-GH-4P σε JST-GH-4P για θύρα I2C
1x πυκνωτής Rubycon ZLH 35V 470uF
Καρφίτσες Dupont 2.54 (Το board αποστέλλεται χωρίς να είναι συγκολλημένο)
Διάταξη

Καλωδίωση VTOL (ArduPlane)
Κανονική εναλλαγή καλωδίων (INAV)
Χαρτογράφηση INAV
ΠΙΝΙΟ
ΠΙΝΙΟ1 /PIO1 παξιμάδι, Χαμηλό επίπεδο από προεπιλογή, Δυνατότητα εναλλαγής μεταξύ χαμηλού/υψηλού επιπέδου από Λειτουργία-ΧΡΗΣΤΗΣ1
Το ΠΙΝΙΟ2 είναι για την εναλλαγή εισόδου κάμερας από το Modes-USER2
Συμβουλές
Το F405-VTOL έχει προεπιλεγμένο λογισμικό INAV για ποιοτικό έλεγχο
Λήψη INAV (Target MATEKF405TE_SD) fw 5.x ή νεότερη έκδοση απευθείας από τον διαμορφωτή INAV 5.x ή νεότερη έκδοση.
Χαρτογράφηση ArduPilot
Frsky Smartport Τηλεμετρία
μη αντιστραμμένο (θαμμένο) σήμα S.Port
οποιαδήποτε ελεύθερη Uart_TX
SERIALx_BAUD 57
ΕΠΙΛΟΓΕΣ_SERIALx 7
SERIALx_PROTOCOL 4 ή 10 (για yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (λειτουργία δημοσκόπησης)
Ρελέ (ΠΙΝΙΟ)
ΠΙΝΙΟ1, πλακέτα PIO1, χαμηλό επίπεδο από προεπιλογή
ΠΙΝΙΟ2, εναλλαγή κάμερας, C1 ΕΝΕΡΓΟΠΟΙΗΜΕΝΟ από προεπιλογή
GPIOs
PA4 ΠΙΝΙΟ1 OUTPUT GPIO(81) LOW //PIO1 pad
PB5 ΠΙΝΙΟ2 OUTPUT GPIO(82) LOW //διακόπτης κάμερας
# ΕΠΙΛΟΓΗ_RCx: Επιλογή εισόδου RC
28 Ενεργοποίηση/Απενεργοποίηση Ρελέ
34 Ρελέ 2 Ενεργοποίηση/Απενεργοποίηση
35 Ρελέ3 Ενεργοποίηση/Απενεργοποίηση
36 Ρελέ 4 Ενεργοποίηση/Απενεργοποίηση
παρ. π.χ.
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Ενεργοποίηση/Απενεργοποίηση ρελέ, Χρησιμοποίησε το CH7 του πομπού για να ελέγχεις το επίπεδο ΧΝΧ1 χαμηλό/ψηλό
RELAY_PIN2 82 //Αλλαγή κάμερας GPIO
RC8_OPTION 34 //Ενεργοποίηση/Απενεργοποίηση Ρελέ2, Χρήση CH8 του Πομπού για έλεγχο υψηλού/χαμηλού επιπέδου στο pad PB5
Η διαμορφωμένη λειτουργία θα ενεργοποιηθεί όταν η τιμή pwm του βοηθητικού διακόπτη γίνει μεγαλύτερη από 1800. Θα απενεργοποιηθεί όταν η τιμή πέσει κάτω από 1200.
Ελέγξτε την τιμή pwm που αποστέλλεται από τον πομπό όταν το διακόπτης είναι υψηλός και χαμηλός χρησιμοποιώντας την οθόνη Βαθμονόμησης Ραδιοφώνου από το Αρχική Διάταξη >> Υποχρεωτικός Εξοπλισμός >> Mission Planner. Εάν δεν ανεβαίνει πάνω από 1800 ή κατεβαίνει κάτω από 1200, είναι καλύτερο να ρυθμίσετε τα άκρα του σερβομηχανισμού στον πομπό.
Συμβουλές
Το F405-VTOL έχει προεπιλεγμένο λογισμικό INAV για ποιοτικό έλεγχο
Το MATEKF405TE_SD δεν είναι αναφερόμενο στον παραμετροποιητή INAV 4.x.x, Υποστηρίζεται από το INAV5.0 ή μεταγενέστερες εκδόσεις
ArduPilot fw, εσωτερικά σφάλματα 0x4000 l:213 spi_fail προειδοποίηση, παρακαλώ ορίστε LOG_BACKEND_TYPE = 1 (File) για καταγραφή λογαριασμού σε κάρτα SD.